На даний момент більшість приводів на ринку мають два типи методів керування зусиллям:
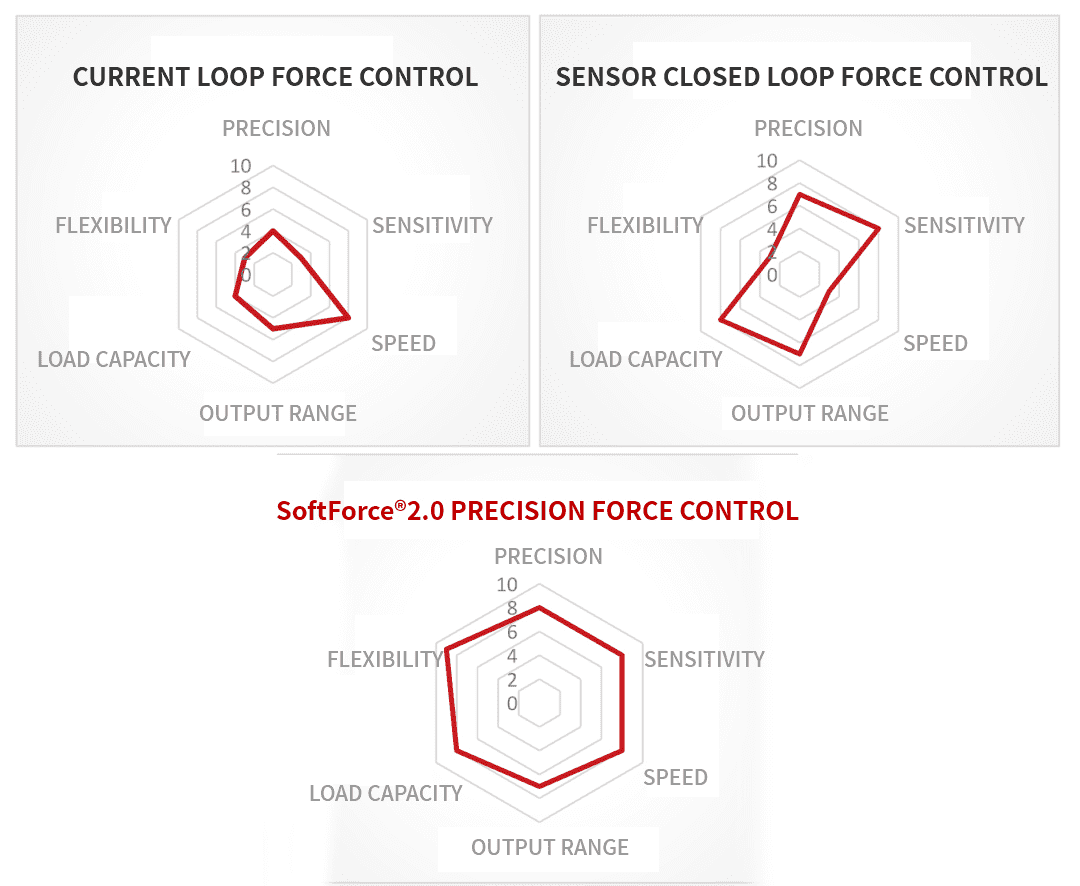
1. Регулювання сили струмового контуру
Відносно простий у реалізації звичайний метод керування силою, який реалізує керування силою шляхом регулювання внутрішнього струму двигуна.Перевагою є те, що його легше реалізувати, і він може досягати контролю сили в діапазоні 5%-15% точності;недоліком є те, що швидкість руху низька, її неможливо повернути назад і вона не може задовольнити потреби деяких сценаріїв з вищими вимогами до точності.Після періоду використання механічне зношення призведе до помилок і ще більше знизить точність.
Такі приводи зазвичай не мають датчиків, а навіть якщо датчики є, вони використовуються лише як «дисплеї» сили і не беруть участі в управлінні.Наприклад, додавши датчик до преса, датчик зчитує величину сили та відображає значення через лічильник, який використовується для допомоги в ручному регулюванні величини сили, але таке регулювання зазвичай не має нічого спільного з точністю сили.

Принципова схема, не пов'язана з графікою і текстом
2. Сенсорне замкнуте управління силою
Іншим методом керування силою є додавання звичайного датчика сили та традиційного алгоритму керування замкнутим контуром.Перевагою є те, що точність покращилася, але недоліком є те, що швидкість все ще низька.Таким чином можна збільшити точність регулювання сили з 5% до 1%.Якщо немає правильного алгоритму обробки або швидкість датчика недостатньо висока, він схильний до «перевищення».
Привід із силовим керуванням
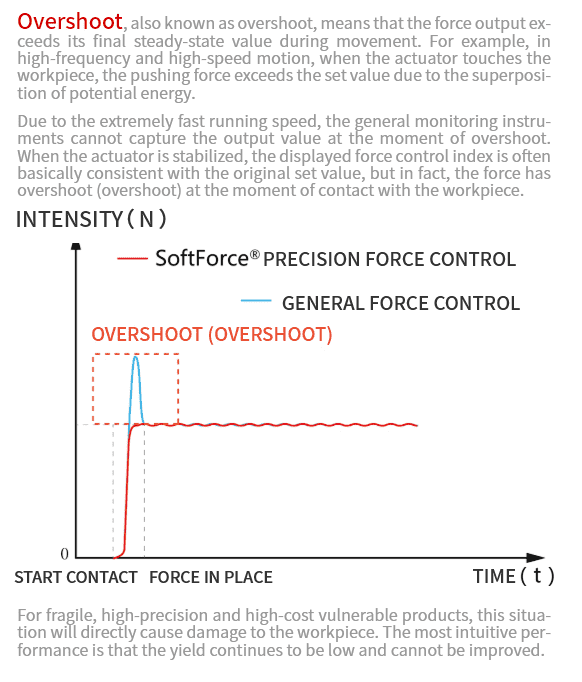
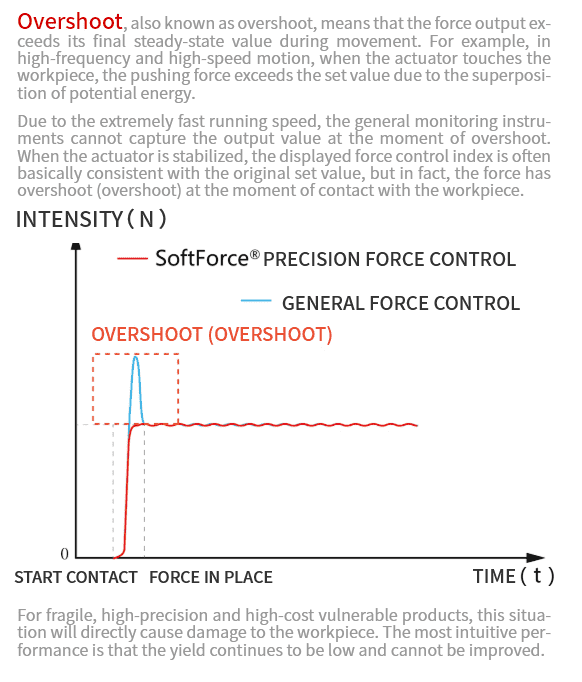
Неминуче «перевищення»?
Метод замкнутого циклу керування силою датчика важко впоратися з силою удару.Найбільш прямим проявом є те, що «перевищення» дуже легко виникнути під час роботи зі сценами з високими вимогами до темпу.
наприклад
Як правило, у випадку високої швидкості та великої продуктивності момент, коли привод торкається заготовки, часто є особливо великим.Наприклад, якщо сила штовхання приводу встановлена на 10 Н, легко досягти 11 Н і 12 Н, коли він торкається деталі, а потім за допомогою алгоритму керування повертається до 10 Н.Такі проблеми часто виникають, коли на ринок додаються датчики сили та так звані силові приводи.
Проблема в тому, що швидкість відповіді недостатньо висока.Висока швидкість, точний і стабільний вихід — це пара протиріч.Якщо є перевищення (перевищення), точна сила на місці не має сенсу.
Особливо в процесі складання високоточного обладнання під тиском, крихких і дорогих деталей, перевищення, як правило, не допускається.
Повний контроль сили, висока частота та висока швидкість без перерегулювання?
Як ТА це робить?
Для сценаріїв застосування з високою точністю використовується метод «м’якої посадки», щоб врахувати вимоги високої швидкості та високої точності, тобто сегментованого керування силою.Привід швидко наближається до деталі в режимі позиційного руху, швидко перемикається в режим керування силою в положенні, де він збирається торкнутися деталі, і поступово збільшує вихідну потужність, поки не досягне попередньо встановленого значення.Режим позиції + режим керування зусиллям + час стабілізації зусилля, загальний використаний час є ефективністю одноразового виконання приводу.
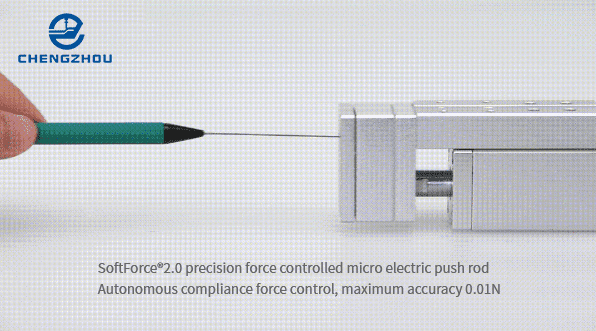
У поєднанні з високошвидкісним датчиком сили та алгоритмом передбачуваного керування на основі моделі прецизійний привод із керуванням зусиллям SoftForce®2.0 може автоматично визначати положення приводу та стан контакту з деталлю, так що привод, як кінець автоматизації обладнання виконує ту ж функцію, що й рука людини.тактильне сприйняття, контроль і інтелект виконання.
На тій самій відстані діапазон швидкості м’якого приземлення «SoftForce ®2.0 Precision Force Control» збільшується, допуск стає більшим, і він навіть може досягти повного контролю сили, що безпосередньо покращує виробничий цикл і значно знижує витрати на випробування та перевірка помилок.
▋Висока частота обробки для досягнення кращої продуктивності
Цикл розрахунку загальновживаної на ринку схеми керування зусиллям «шестиосьовий датчик сили + робот» становить 5-10 мілісекунд, тобто частота обробки 100-200 Гц.Частота обробки прецизійних силових приводів SoftForce®2.0 може досягати 4000 Гц (тобто 0,25 мілісекунди), а моделі високочастотної серії можуть досягати 8000 Гц, що в 4-8 разів перевищує частоту обробки звичайних роботів із силовим керуванням.
▋Активний податливий контроль сили, який може слідкувати за зміною зовнішньої сили
Ефективна швидкість відгуку та миттєвий зворотний зв’язок зусилля дозволяють приводу миттєво реагувати на зовнішні сили та досягати активного сумісного контролю зусилля.Навіть якщо під час роботи виникають зовнішні сили, їх можна вчасно відкоригувати, що зробить процес більш точним.Кращий захист заготовок.
Висока частота і висока швидкість без перерегулювання
Навіть під час високочастотного та високошвидкісного руху він все ще зберігає високу точність виведення, і в той же час забезпечує «м’яке приземлення» та «без викиду», контактує з поверхнею деталей з високою швидкістю, невеликою силою та виконує гнучкість збирання та розміщення деталей тощо, щоб уникнути пошкодження делікатних і крихких частин.компоненти.
SoftForce®2.0 Precision Force Control
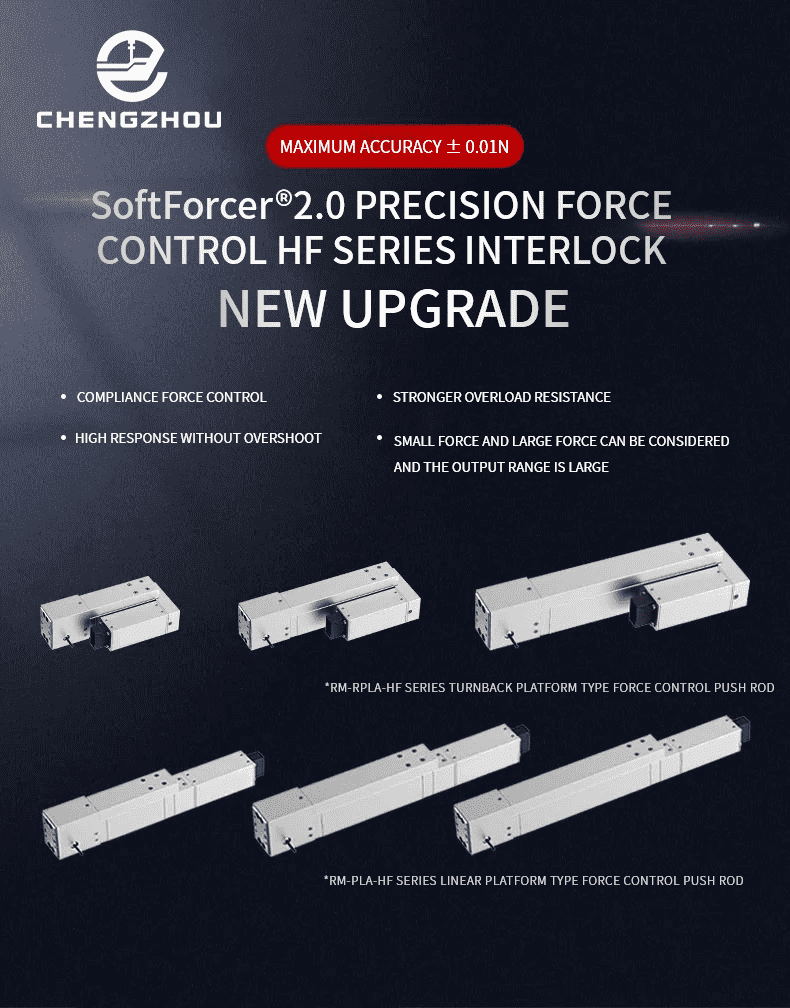
Нове оновлення серії HF
▋ Сильніший захист від перевантаження
Базуючись на глибокому розумінні процесу на місці та численних ітераціях, нещодавно оновлена серія прецизійного контролю сили SoftForce®2.0 Chengzhou HF у лютому цього року має інтегровану конструкцію датчика, а його здатність запобігати перевантаженням у кілька разів вища, ніж у минуле, з більшою довговічністю та простотою використання.Справляйтеся з більш складними умовами.
▋Можна враховувати як малу силу, так і велику потужність
Оснащений високоточною системою керування силою SoftForce®2.0, прецизійний рухомий стіл і штовхач із великим ходом і великим навантаженням можуть генерувати невелику й точну силу під високим навантаженням, а також можуть враховувати силу при цьому часу, а діапазон виходу ширший.Більший, тобто ширший динамічний діапазон сил*.
*Динамічний діапазон сили: співвідношення між максимальною та мінімальною силою, яка може бути виведена.
Точне керування зусиллям можна використовувати лише на одній осі
Прецизійні приводи з силовим керуванням SoftForce®2.0 можна використовувати не лише на одній осі, але й надають більше можливостей для багатоосьових монтажних рішень.Наприклад, остання «система керування платформою синхронного точного управління силою RM Chengzhou 2D», запущена компанією Chengzhou Technology, складається з двох прецизійних силових приводів Chengzhou, які можуть замінити силу схеми керування «шестиосьовий датчик + робот», використовується для точного шліфування та видалення задирок внутрішньої рамки мобільних телефонів тощо.
Система управління платформою синхронного прецизійного управління силою Chengzhou 2D
(Оснащено високоточною системою контролю сили SoftForce®2.0)
Складні та прості у використанні професійні послуги
Удосконалений алгоритм керування та простий процес налагодження забезпечують зручність користування клієнтами.Навіть оператор із низьким рівнем досвіду може розпочати роботу за 5 хвилин, справді «підключи та працюй».
У той же час професійна та сильна команда післяпродажного технічного обслуговування Chengzhou Technology може надати клієнтам своєчасну, всебічну та безтурботну технічну підтримку з першого разу, будь то технічні сумніви, навчання, усунення несправностей або технічне обслуговування.
Chengzhou Technology завжди була достатньо сміливою, щоб розширити свої межі.Завдяки надійній та інноваційній технічній силі компанія постійно випускає більш інтелектуальні, точніші та більш сумісні високоякісні приводи, щоб забезпечити передові продукти для упаковки та тестування напівпровідників, автоматизації 3C, точного виробництва, інтелектуальної медицини та інших галузей.основні компоненти, такі як системи точного керування рухом і приводи.
Час розміщення: 31 травня 2022 р